Shaft Encoders
Any transducer that
generates a coded digital signal of a measured quantity is known as an encoder.
Shaft encoders are used to measure angular displacements and angular
velocities. High resolution, high accuracy, and digital output are some of the
relative advantages of shaft encoders.
Resolution:
Depends on the word size of the encoder output and the number of pulses
generated per revolution of the encoder.
Accuracy:
Due to noise immunity and reliability of
digital signals.
Encoder Types
Shaft encoders can be
classified into two categories depending on the nature and the method of
interpretation of the transducer output: (1) incremental encoders and (2)
absolute encoders.
Incremental Encoder
The output of an
incremental encoder is a pulse train signal, which is generated when the
transducer disk rotates. The number of pulses and the number of pulse per unit
time gives the measurement of angular displacement and angular velocity of the
device on which the encoder disk is mounted. With an incremental encoder,
displacement is obtained with respect to some reference point or marker. That
is, incremental encoder giver relative position of a body wrt its initial
position. The reference point can be the home position of the moving component
(say, determined by a limit switch) or a reference point on the encoder disk,
as indicated by a reference pulse (index pulse) generated at that location on
the disk. The index pulse count determines the number of full revolutions.
Absolute Encoder
An absolute encoder has
many pulse tracks on its transducer disk. When the disk of an absolute encoder
rotates, several pulse trains are generated simultaneously. The number of pulse
train is equal to the number of tracks on the disk. At a given instant, the
magnitude of each pulse signal will be either ‘1’ (HIGH) or ‘0’ (LOW) depending
on opaque and transparent segment of disk.. Hence, the set of pulse trains
gives an encoded binary number at any instant. This encoded binary data gives
the absolute position of the body on which the encoder is mounted. The pulse
voltage can be made compatible with some digital interface logic (e.g TTL).
Consequently, the direct digital readout of an angular position is possible
with an absolute encoder. Absolute encoders are commonly used to measure
fractions of a revolution. However, complete revolutions can be measured using
an additional track, which generates an index pulse, as in the case of an
incremental encoder. The same signal generation (and pick-off) mechanism may be
used in both types (incremental and absolute) of transducers.
Encoder Technologies
Four techniques of transducer
signal generation may be identified for shaft encoders:
1.
Optical method- we will discuss only
this method in the post.
2.
Sliding contact (electrical conducting)
method
3.
Magnetic saturation (reluctance) method
4.
Proximity sensor method
By far, the optical
encoder is most common and cost-effective. The other three methods may be used
in special circumstances, where the optical method may not be suitable (e.g.,
under extreme tem peratures or in the presence of dust, smoke, etc.). For a
given type of encoder (incremental or absolute), the method of signal
interpretation is identical for all four types of signal generation listed
previously. Now we briefly describe the principle of signal generation for all
four techniques and consider only the optical encoder in the context of signal
interpretation and processing.
Optical Encoder
The optical encoder
uses an opaque disk (coded disk) that has one or more circular tracks, with
some arrangement of identical transparent windows (slits) in each track. A
parallel beam of light (e.g., from a set of light-emitting diodes or LEDs) is
projected to all tracks from one side of the disk. The transmitted light is
picked off using a series of photosensors on the other side of the disk, which
typically has one sensor for each track. This arrangement is shown in Figure a,
which indicates just one track and one pick-off sensor. The light sensor could
be a silicon photodiode or a phototransistor. Since the light from the source
is interrupted by the opaque regions of the track, the output signal from the
photosensor is a series of voltage pulses. This signal can be interpreted
through edge detection or level detection to obtain the increments in
the angular position and also the angular velocity of the disk.
The sensor element of
such a measuring device is the encoder disk, which is coupled to the rotating
object directly or through a gear mechanism. The transducer stage is the
conversion of disk motion (analog) into the pulse signals, which can be coded
into a digital word.
If the direction of
rotation is not important, an incremental encoder disk requires only one
primary track that has equally spaced and identical pick-off regions. A
reference track that has just one window may be used to generate the index
pulse, to initiate pulse counting for angular position measurement and to
detect complete revolutions.
Note: A transparent disk with a track of opaque spots will work equally well
as the encoder disk of an optical encoder. In either form, the track has a 50%
duty cycle (i.e., the length of the transparent region is equal to the length
of the opaque region).
Direction of Rotation
An incremental encoder generally
have a second track placed at quarter-pitch separation from the first track
pattern (pitch = center-to-center distance between adjacent windows) to generate
a quadrature signal, which will indicate the direction of rotation.
An incremental encoder typically has the following five pinouts:
1. Ground
2. Index Channel
3. A Channel
4. +5V dc power
5. B Channel
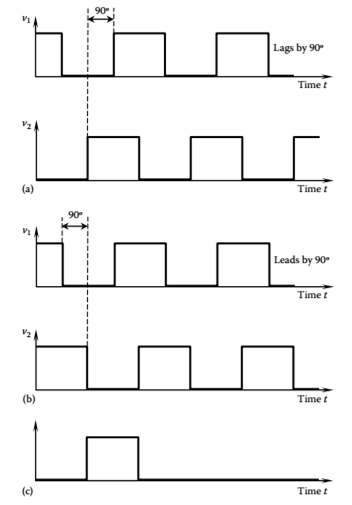
Pins for Channel A and
Channel B give the quadrature signals shown in Figure a and b, and the Index pin
gives the reference pulse signal shown in Figure c. Figure 2a shows the sensor
outputs (v1 and v2) when the disk rotates in the clockwise (cw)
direction; and Figure 2b shows the outputs when the disk rotates in the
counterclockwise (ccw) direction. Several methods can be used to determine the
direction of rotation using these two quadrature signals. For example,
1. By phase angle between the two signals
2.
By clock counts to two
adjacent rising edges of the two signals
3.
By checking for rising or
falling edge of one signal when the other is at high
4.
For a high-to-low transition of one signal
check the next transition of the other signal
Pulsed signal output
of incremental encoder. (a) CW rotation; (b) CCW rotation; (c) Index pulse
Method 1: It is clear from Figure 2a
and b that in the CW rotation, v1 lags v2 by a quarter of a cycle
(i.e., a phase lag of 90°) and in the CCW rotation, v1 leads v2
by a quarter of a cycle. Hence, the direction of rotation may be obtained by
determining the phase difference of the two output signals, using phase detecting
circuitry.
Method 2: A rising edge of a pulse
can be determined by comparing successive signal levels at fixed time periods
(can be done in both hardware and software). Rising-edge time can be measured
using pulse counts of a high-frequency clock. Suppose that the counting
(timing) begins when the v1 signal begins to rise (i.e., when a rising
edge is detected). Let n1 = number of clock cycles (time) up to the time
when v2 begins to rise; and n2 = number of clock cycles up to the
time when v1 begins to rise again. Ten, the following logic applies:
If n1
> n2 – n1àCW rotation
If n1
< n2 – n1àCCW rotation
Method 3: In this case, firstly
high level logic of v2 is detected and then check if v1
is at rising or falling edge.
If v1 is at rising edge when v2 is at logic
high à CW rotation
If v1
is at falling edge when v2 is at logic high à CCW rotation
Method 4: Detect a high to low
transition in signal v1.
If the next transition in signal v2 is Low to High à CW rotation
If the next
transition in signal v2 is High to Low à CCW rotation
















































{kind=link}
{kind=link}